DE HOOFDCOMPONENTEN VAN EEN ONBEMAND LUCHTVAARTUIG
Van een piloot wordt verwacht dat deze bekend is met de handleiding van het onbemande luchtvaartuig dat hij/zij bestuurt. In zo’n handleiding worden verschillende componenten van het onbemande luchtvaartuig besproken.
Algemene componenten
De basiscomponenten van zowel een onbemand luchtvaartuig met vaste vleugels als met meerdere rotoren zijn weergeven in onderstaande afbeeldingen.
Vaste vleugel
- Motor: genereert de voortdrijvende kracht.
- Vleugel: zorgt voor lift en stabiliteit tijdens de vlucht.
- Rolroer: zorgt voor een draaibeweging om de langs-as.
- Romp: structurele kern van alle componenten en onderdelen.
- Hoogteroer: zorgt voor een draaibeweging om de dwars-as.
- Richtingsroer: zorgt voor een draaibeweging om de top-as.

Meerdere rotoren
- Propeller: zorgt voor het genereren van lift.
- Motor: elektromotoren, in combinatie met een ESC (Electronic Speed Controller, zorgen voor het draaien van de propellers.
- Romp/Casco: dient als bescherming van de elektrische componenten. Het landingsgestel en de armen van de multirotor zijn meestal aan de romp bevestigd voor een degelijke structuur.
- Sensoren: sommige multirotors hebben sensoren om aan te geven als obstakels te dichtbij de multirotor komen.
- Camera: meeste camera's zijn gecombineerd met een cardanische ophanging (gimbal) voor stabilisering.
- Accu: voorziet het onbemande luchtvaartuig van stroom.

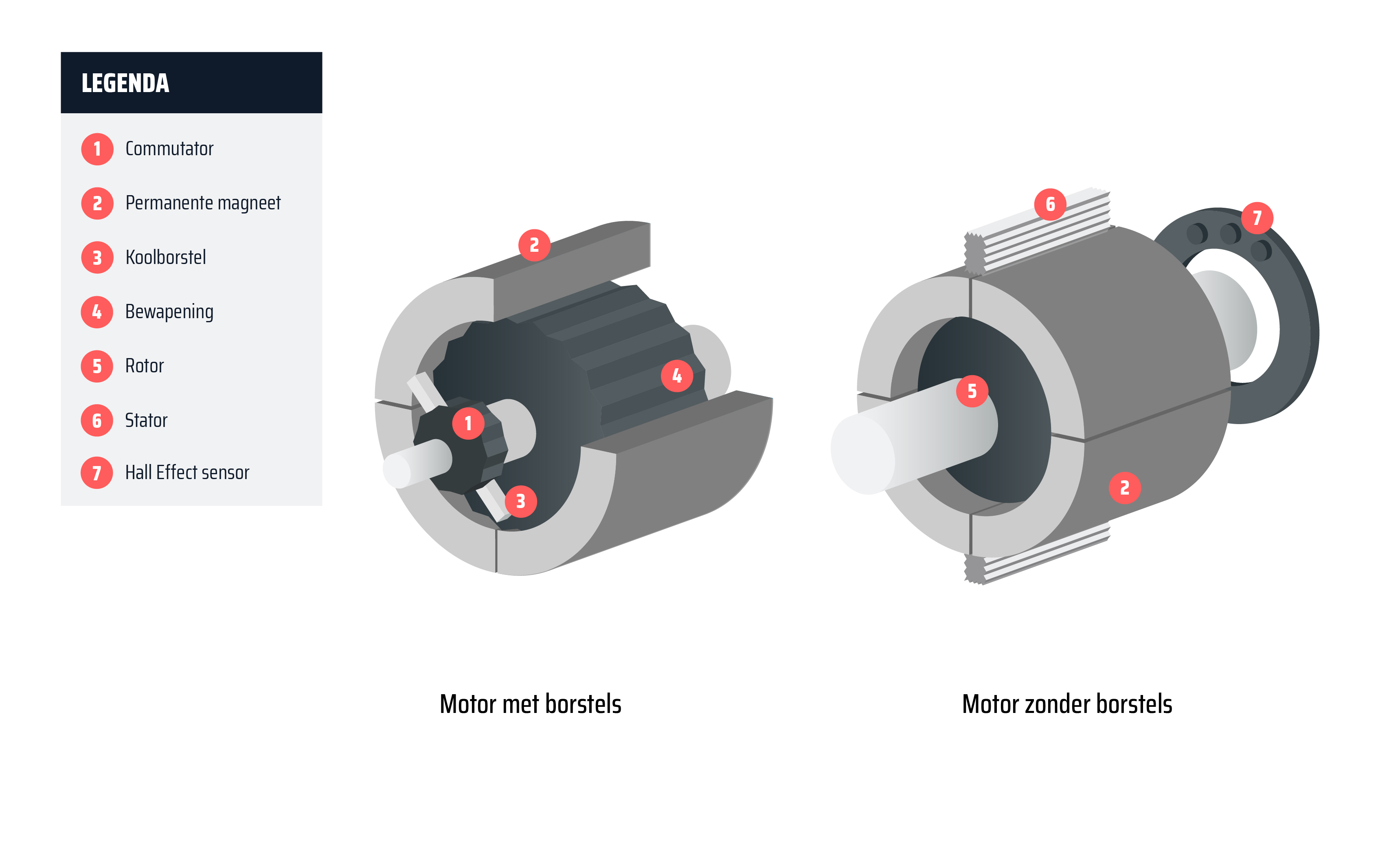
De elektromotor
Bijna alle onbemande luchtvaartuigen, vooral die met meerdere rotors, worden aangedreven door een elektromotor. Een elektromotor werkt op basis van elektromagnetische principes. Dit houdt in dat elektriciteit wordt gebruikt om een magnetisch veld op te wekken. In de elektromotor zitten magneten die vrij op een as kunnen draaien. Door aanpassing van het magnetisch veld worden de magneten aangetrokken of afgestoten, waardoor de as van de elektromotor draait. Aan deze as zit dan bijvoorbeeld de propeller bevestigd. Er zijn twee soorten elektromotoren:
Brushed motor
- Koolborstels geleiden stroom;
- Slechte efficiëntie;
- Slijtagegevoelig;
- Beter regelbaar op lager vermogen.
Brushless motor
- Richting magnetisch veld elektronisch geregeld;
- Hoge efficiëntie;
- Lange levensduur;
- Speciale regelaar nodig, start trager.
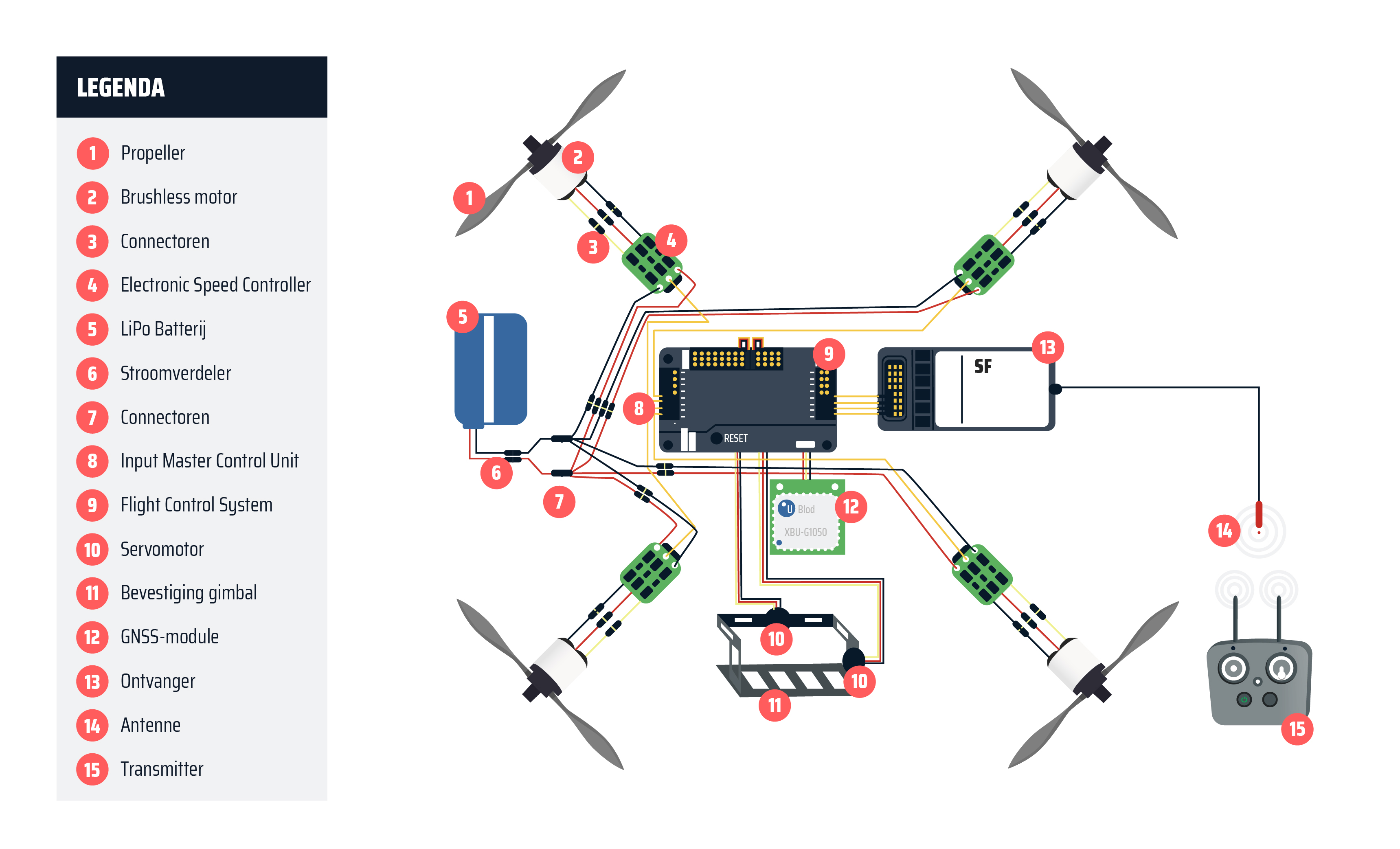
Het elektrisch systeem
Het elektrisch systeem bestaat uit een of meer subsystemen waarvan de onderstaande de twee belangrijkste zijn:
- ESC = Electronic Speed Controller, regelt het toerental en de draairichting van de motoren.
- FCS = Flight Control System, verwerkt signalen van navigatiemodule en besturingssignalen.
Het Flight Control System bestaat weer uit een aantal componenten waarvan de onderstaande de belangrijkste zijn:
- MCU = Master Control Unit: verwerkt de gegevens vanuit de sensor voor de basisbesturing van het onbemande luchtvaartuig.
- IMU = Inertial Measurement Unit: bestaat uit een accelerometer, hoeksnelheidsmeter en barometrische hoogtemeter. De IMU meet onder andere de snelheid, de hoek, de toestand van het onbemande luchtvaartuig en de hoogte boven de startlocatie en zorgt voor de stabiliteit.
- GNSS-module = Global Navigation Satellite System-module: bepaalt de positie van het onbemande luchtvaartuig en ondersteunt bij onder meer het hoveren, het vliegen van waypoints en de Return-to-Home-modus.
- Compass-module: bepaalt de koers van het onbemande luchtvaartuig en ondersteunt bij de besturing ten opzichte van de bewegingen rondom de assen.
- PMU = Power Management Unit: voorziet het Flight Control System van stroom en detecteert de voltages van de Master Control Unit en de accu's.
Overige belangrijke subsystemen binnen het elektrisch systeem zijn onder meer de accu's, gyroscopen, elektrische bedrading, RC-controller, datalinks, AutoPilot Control Board en het Drive en Control System.
Brandstof en energie
De meeste onbemande luchtvaartuigen gebruiken een accu als energiebron. De lithium- polymeer-accu (LiPo) wordt dankzij het grote vermogen in verhouding tot het gewicht veel gebruikt. Een LiPo-accu heeft een aantal belangrijke kenmerken:
- Droge accu zonder metalen;
- Mag nooit volledig ontladen worden;
- Lage zelfontlading;
- Geen geheugeneffect;
- Bij piekbelasting loopt de capaciteit snel terug;
- Kans op zelfontbranding;
- Vergt gestabiliseerde laadapparatuur.
LiPo-accu's presteren het beste bij ongeveer 40 °C. Daalt de temperatuur onder de 10-15 °C, dan worden de vluchttijden van een accu korter. Aangeraden wordt om de accu altijd voor te verwarmen, dit kan in de speciaal daarvoor bestemde accu verwarmers.
Een LiPo-accu kan door verkeerd opladen beschadigd raken, waardoor er brandgevaar ontstaat. Laad de accu daarom uitsluitend met specifieke laders en bewaar de accu in speciale LiPo-tassen. De LiPo-accu mag tijdens het reizen ook alleen nog worden meegenomen als handbagage. Vermeld hierbij altijd duidelijk de capaciteit op de accu en controleer de voorwaarden van de desbetreffende luchtvaartmaatschappij.
Positiebepaling
Het Global Navigation Satellite System (GNSS) is een vorm van radionavigatie dat gebruik maakt van ‘tijd’. Rondom de aarde verplaatsen satellieten met een zender zich in een vaste baan. Doordat de ontvanger op de aarde weet waar de zenders zich bevinden, is het mogelijk de tijdsduur van de signalen te meten en zo de positie te berekenen.
Het GNSS bestaat uit meerdere systemen van verschillende eigenaren:
- Global Positioning System (GPS) – USA;
- Galilei – Europa;
- Global Navigatsionnaja Spoetnikovaja Sistema (GLONASS) – Rusland;
- Beidou / Compass – China.

Een ontvanger heeft 3 tot 4 signalen nodig voor een globale positiebepaling. Als er 3 satellieten worden gebruikt, kan er een tweedimensionale positie op het aardoppervlak worden bepaald, ook wel een coördinaat genoemd. Als er 4 satellieten worden gebruikt, is een driedimensionale positiebepaling nodig. Om tot een aantal satellieten te komen is het mogelijk om de satellieten van de verschillende systemen te combineren. Als piloot moet je er rekening mee houden dat een hoogtebepaling minder nauwkeurig is dan een positiebepaling. Daarnaast heeft een onbemand luchtvaartuig minimaal 4 werkzame satellieten nodig om in de GNSS-modus te vliegen.